LRT Research Videos [SerienID : 2506]
Semester
Verteilt sich über mehrere Semester, wobei das letzte das Wintersemester 2025/2026 ist
Lehrenden

Zugang via
Offener Zugang
aktualisiert
2025-12-03 17:33:08
Abonnements
1
-
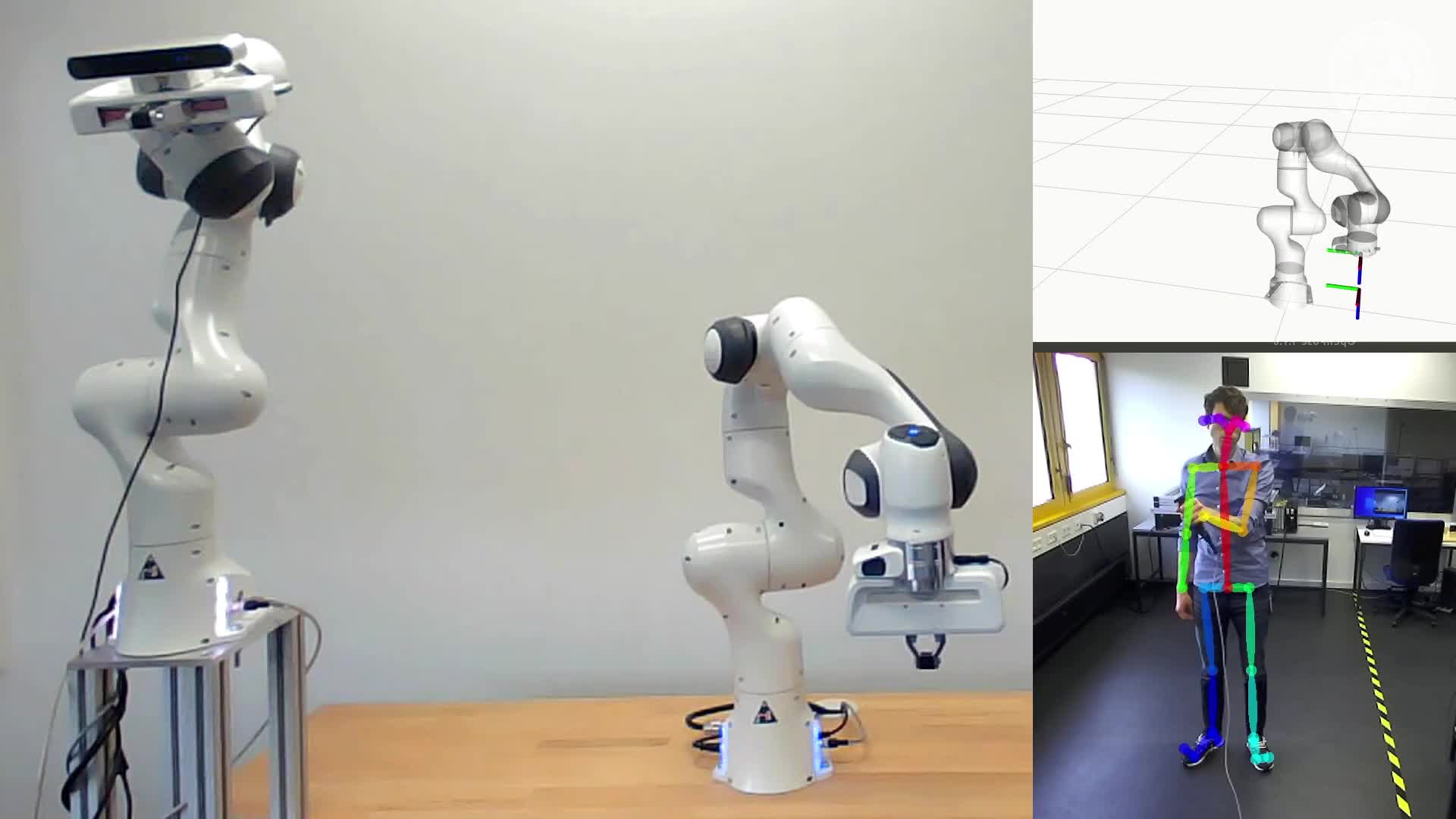
# 1Offener ZugangSkeleton Tracking using Model Predictive Interaction Control - #3 LRT Robotics HackathonM. Sc. Tobias Gold2021-05-28 Sommersemester 20211Skeleton Tracking using Model Predictive Interaction Control - #3 LRT Robotics HackathonM. Sc. Tobias Gold2021-05-28 Sommersemester 2021Offener Zugang
-
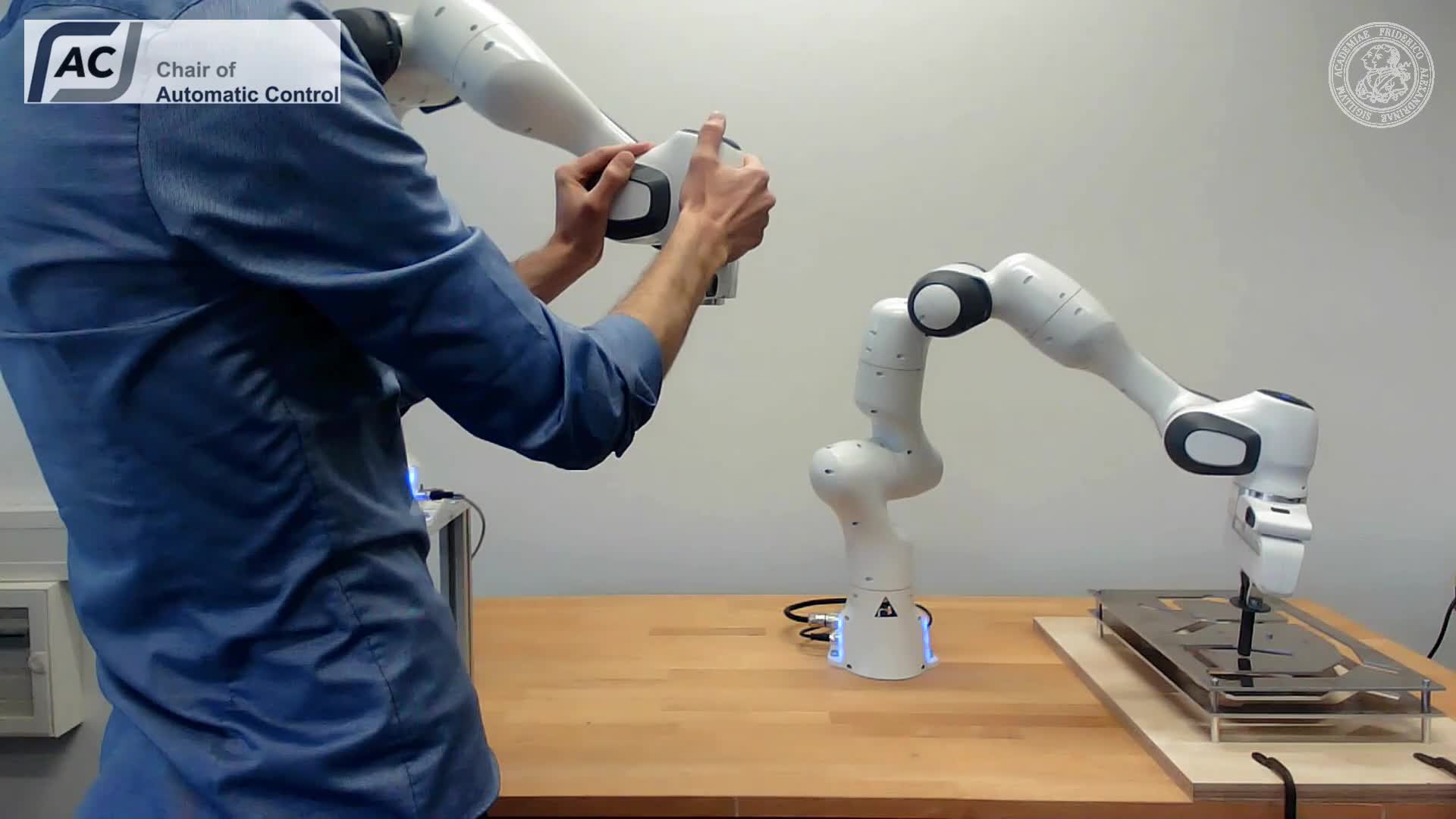
# 1Offener ZugangDual Arm Beer Opening Application - #2 LRT Robotics HackathonM. Sc. Tobias Gold2021-05-27 Sommersemester 20211Dual Arm Beer Opening Application - #2 LRT Robotics HackathonM. Sc. Tobias Gold2021-05-27 Sommersemester 2021Offener Zugang
-
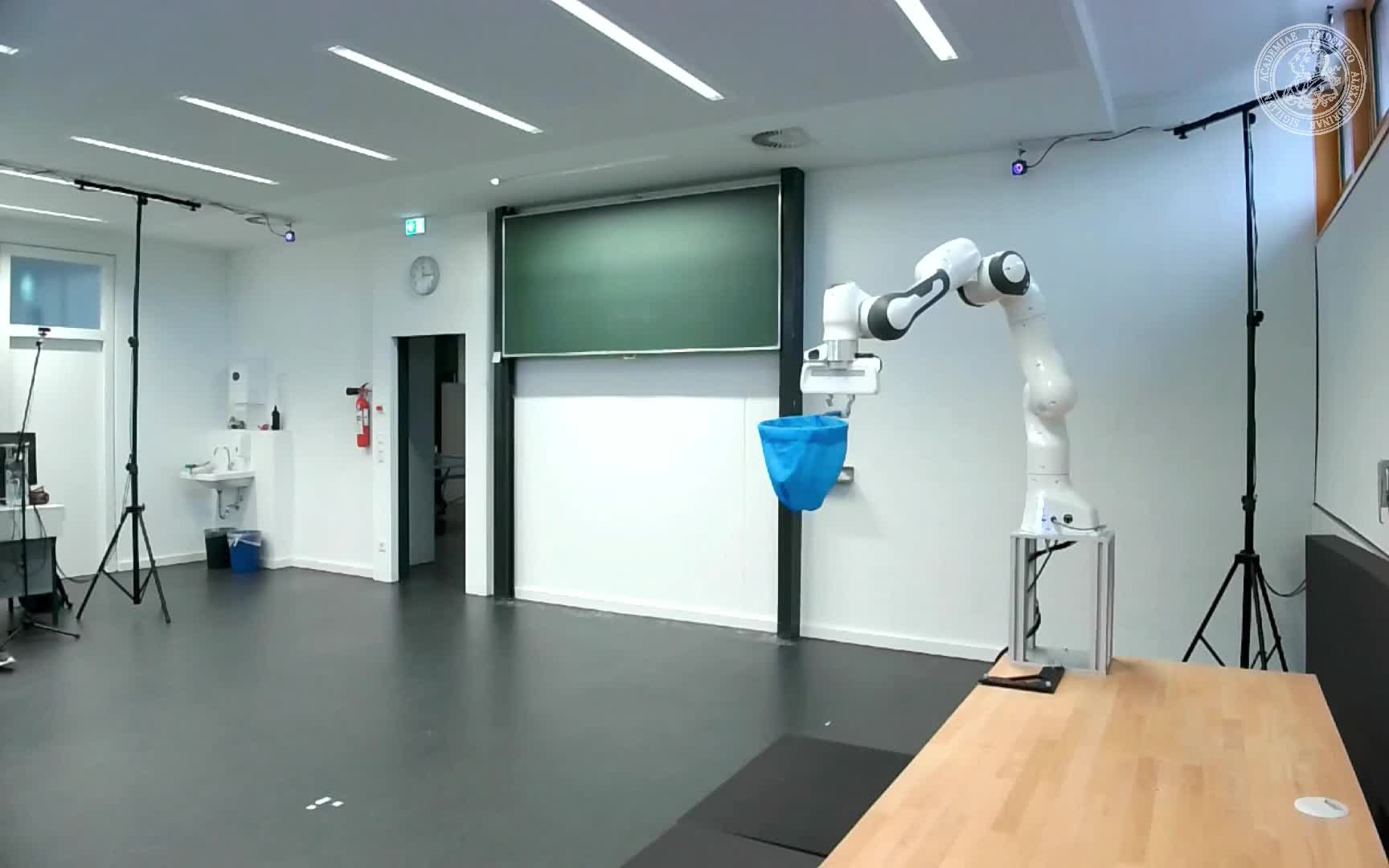
# 1Offener ZugangCatching Objects with a Robot Arm using Model Predictive ControlM. Sc. Tobias Gold2021-10-12 Sommersemester 20211Catching Objects with a Robot Arm using Model Predictive ControlM. Sc. Tobias Gold2021-10-12 Sommersemester 2021Offener Zugang
-
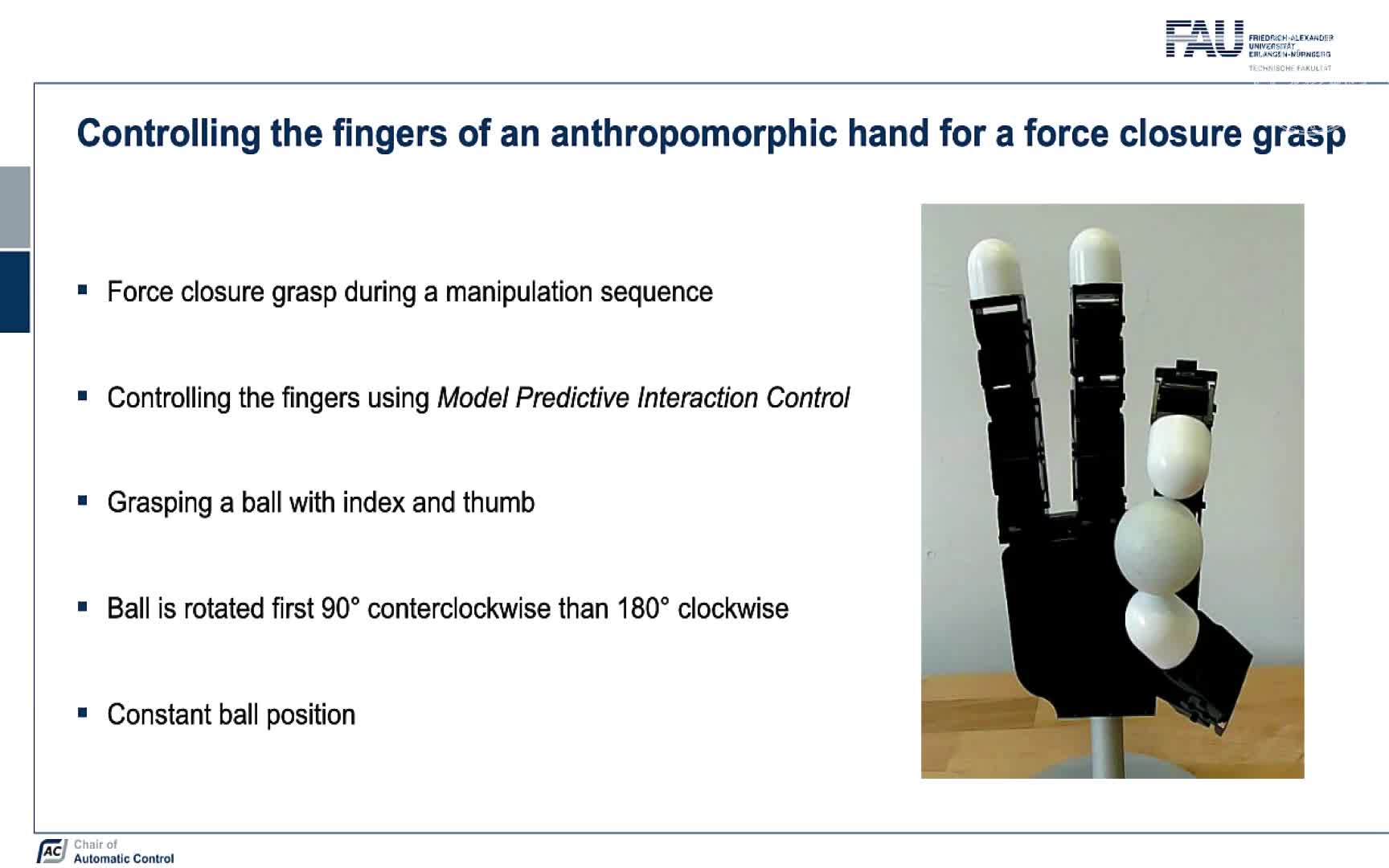
# 1Offener ZugangModel Predictive Interaction Control for Force Closure GraspingM. Sc. Tobias Gold2021-05-27 Sommersemester 20211Model Predictive Interaction Control for Force Closure GraspingM. Sc. Tobias Gold2021-05-27 Sommersemester 2021Offener Zugang
-
# 1Offener ZugangRobot arm teleguiding with force feedback - #1 LRT Robotics HackathonM. Sc. Tobias Gold2021-05-28 Sommersemester 20211Robot arm teleguiding with force feedback - #1 LRT Robotics HackathonM. Sc. Tobias Gold2021-05-28 Sommersemester 2021Offener Zugang
-
# 1Offener ZugangCatching Objects with a Robotic ArmM. Sc. Tobias Gold2021-07-12 Sommersemester 20211Catching Objects with a Robotic ArmM. Sc. Tobias Gold2021-07-12 Sommersemester 2021Offener Zugang
-
# 1Offener ZugangModel Predictive Interaction Control for Robotic Manipulation TasksM. Sc. Tobias Gold2021-11-05 Sommersemester 20211Model Predictive Interaction Control for Robotic Manipulation TasksM. Sc. Tobias Gold2021-11-05 Sommersemester 2021Offener Zugang
-
# 2Offener ZugangExperimental Validation of the Open-Source DMPC-Framework GRAMPC-D applied to the Remotely Accessible RobotariumDr.-Ing. Andreas Völz2021-05-27 Sommersemester 20212Experimental Validation of the Open-Source DMPC-Framework GRAMPC-D applied to the Remotely Accessible RobotariumDr.-Ing. Andreas Völz2021-05-27 Sommersemester 2021Offener Zugang
-
# 3Offener ZugangModel Predictive Interaction Control based on a Path-Following FormulationDr.-Ing. Andreas Völz2022-05-30 Sommersemester 20213Model Predictive Interaction Control based on a Path-Following FormulationDr.-Ing. Andreas Völz2022-05-30 Sommersemester 2021Offener Zugang
-
# 4Offener ZugangDMP-based Path-Planning for Model Predictive Interaction ControlTim Goller2023-10-31 Wintersemester 2023/20244DMP-based Path-Planning for Model Predictive Interaction ControlTim Goller2023-10-31 Wintersemester 2023/2024Offener Zugang
-
# 5Offener ZugangProgramming by Demonstration for Model Predictive Interaction ControlTim Goller2024-02-01 Wintersemester 2023/20245Programming by Demonstration for Model Predictive Interaction ControlTim Goller2024-02-01 Wintersemester 2023/2024Offener Zugang
-
# 6Offener ZugangSensitivity-based Distributed NMPC: Experimental Results for a Levitating Planar Motion SystemMaximilian Pierer von Esch2024-06-10 Wintersemester 2023/20246Sensitivity-based Distributed NMPC: Experimental Results for a Levitating Planar Motion SystemMaximilian Pierer von Esch2024-06-10 Wintersemester 2023/2024Offener Zugang
-
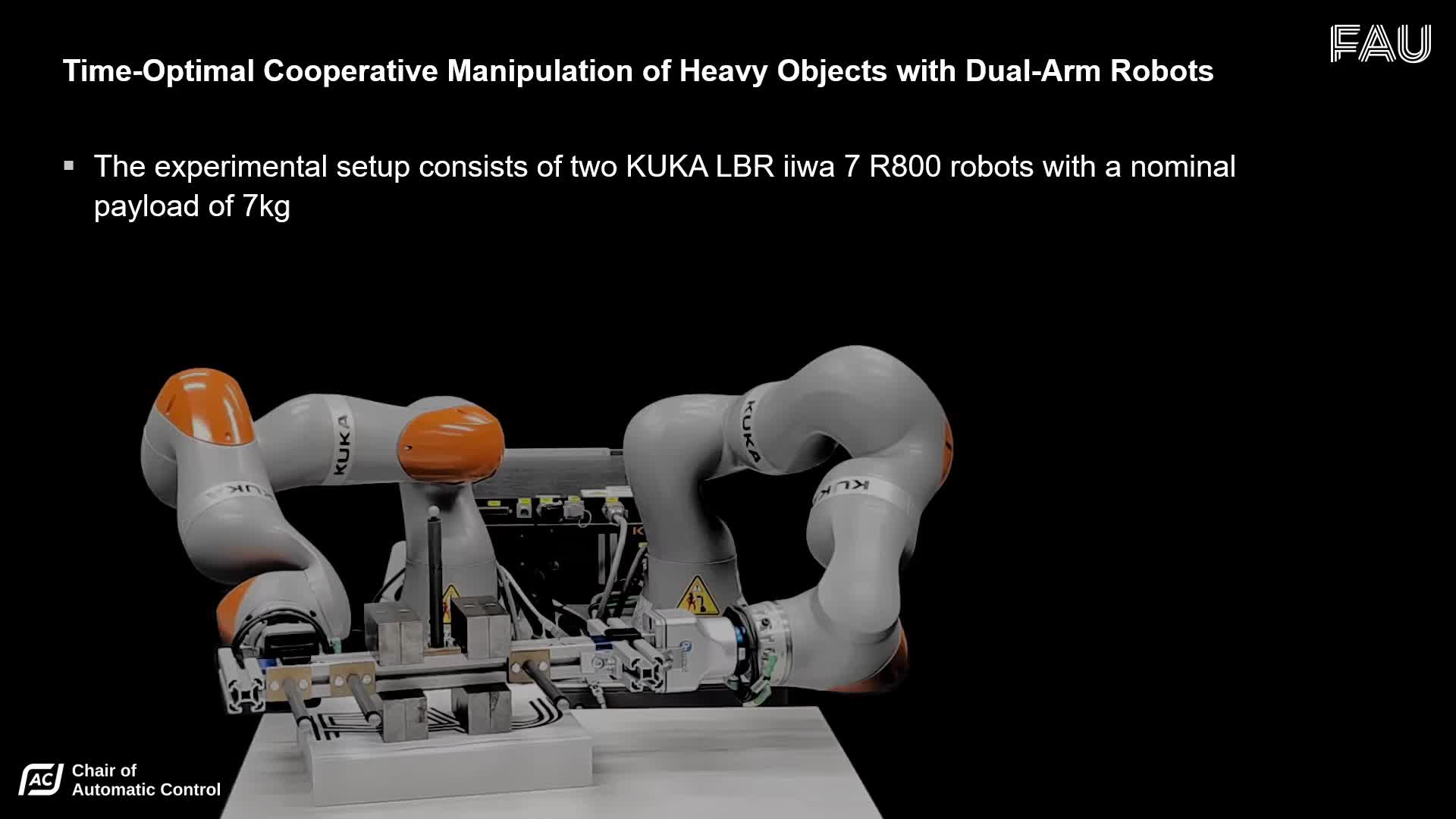
# 7Offener ZugangTime-Optimal Cooperative Manipulation of Heavy Objects with Dual-Arm RobotsDr.-Ing. Andreas Völz2025-01-30 Wintersemester 2023/20247Time-Optimal Cooperative Manipulation of Heavy Objects with Dual-Arm RobotsDr.-Ing. Andreas Völz2025-01-30 Wintersemester 2023/2024Offener Zugang
-
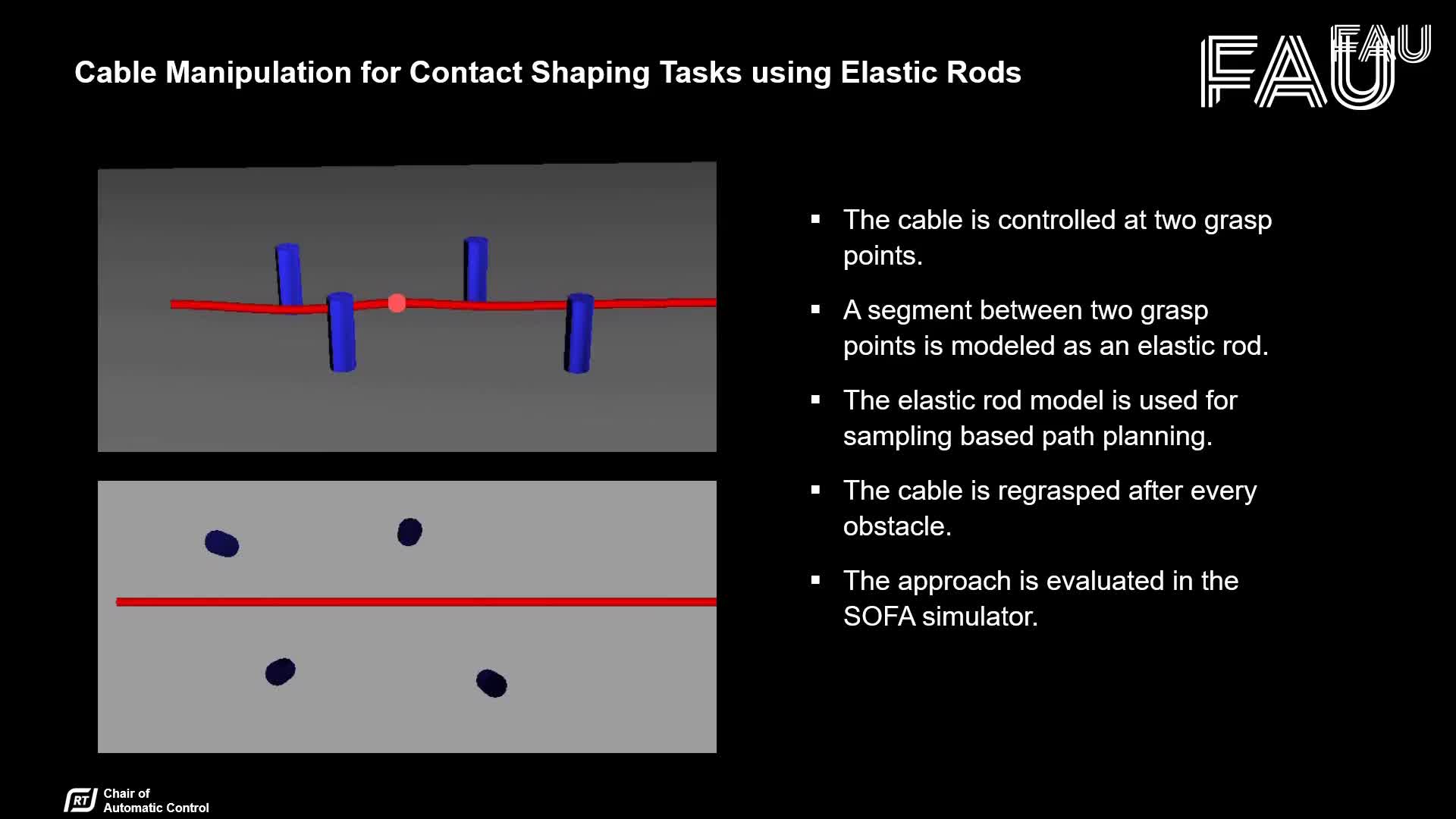
# 9Offener ZugangCable Manipulation for Contact Shaping Tasks using Elastic RodsProf. Dr. Knut Graichen2025-05-28 Sommersemester 20259Cable Manipulation for Contact Shaping Tasks using Elastic RodsProf. Dr. Knut Graichen2025-05-28 Sommersemester 2025Offener Zugang
-
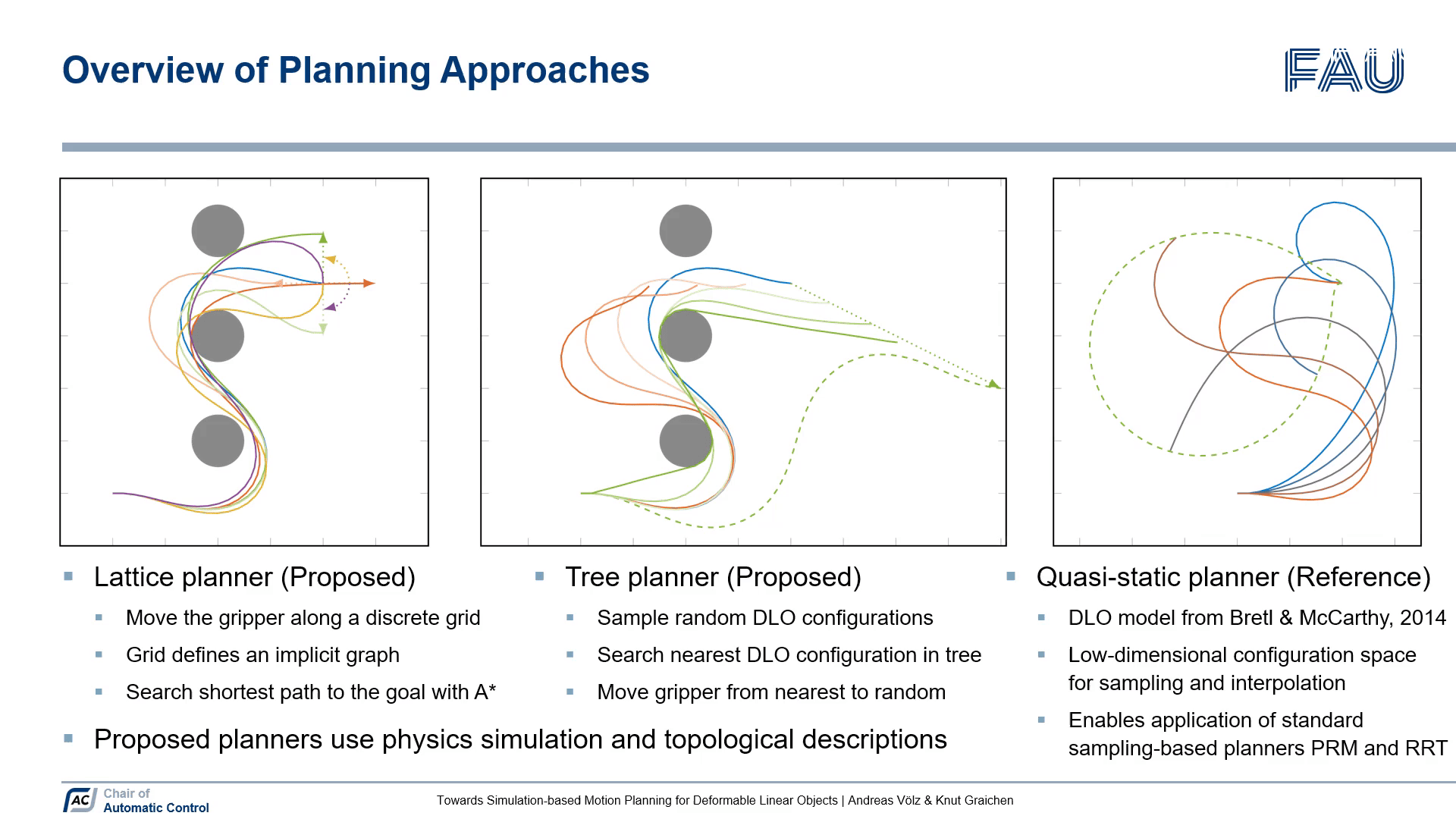
# 10Offener ZugangTowards Simulation-based Motion Planning for Deformable Linear ObjectsDr.-Ing. Andreas Völz2025-12-03 Wintersemester 2025/202610Towards Simulation-based Motion Planning for Deformable Linear ObjectsDr.-Ing. Andreas Völz2025-12-03 Wintersemester 2025/2026Offener Zugang